Chapter 9: Case Study Smart Skies Project
Student Learning Objectives
Chapters 7 and 8 covered SAA systems, collision avoidance technologies and designing UAS for stealth. In Chapter 9, the student advances the SAA principles by investigating one of the more interesting published research projects in SAA known as the Smart Skies Project. Smart Skies was a defining project that has spurned many different research papers, funded projects, technology advancements and improved conditions at airports.
Safety
The primary goal of UAS is safe, predictable flying in the NAS. To do this UAS must have SAA “capability that replicates a human function: to see and avoid.” (Wilson, 2012)
This is quite a challenge and has been the delaying factor for wide-spread “integration of UAS into the NAS” other, then limited classes of airspace. Further, the level of safety achievable by UAS designers must be at least equal to that of “manned aviation. Until Sense and Avoid (SAA) for UAS reaches equal or better capability to See and Avoid,” FAA will continue to restrict operations of UAS in the NAS. (Wilson, 2012)
See and Avoid
Visual Flight Rules (VFR) “require pilots to see and avoid aircraft and other objects while flying visual meteorological conditions.” (Wilson, 2012) Current see and avoid technology has clearly prevented collisions, however the state-of-the-art is far from reliable. “Some of the limiting factors are: human visual system, demands of cockpit tasks, and physical and environmental conditions. These combine to make see and avoid an uncertain method of traffic separation.” (ICAS, 2012) Wilson (2012) presents several studies that show that pilots do not perform well for unalerted visual searches. Another study showed that pilots “spent more time looking inside the cockpit than outside and that the average scanning performance would leave them vulnerable to late detection of aircraft conflicts” and adequate reaction time. (Wilson, 2012)
Case Study: The Smart Skies Project
“The Smart Skies Project (SSP) was a 3-year AUD $10M joint venture amongst ARCAA, QUT, BR & T, and Insitu Pacific. The Smart Skies Project was, created to enable technologies for UAS operations in non-segregated airspace.” (Wilson, 2012) Specific objectives of SSP were to, “develop and demonstrate automated separation management technologies that facilitate use (sic) of the national airspace system by both manned and unmanned aircraft.” The second objective was to, “use (sic) the information and experiences gained to support the further development of standards, regulations and safe operating practices for civil and commercial UAS in Australia and overseas (USA).” ARCAA accomplished both goals. Later in the chapter the author will summarize several practical research projects that SSP inspired. “SSP describes “development of an automated separation management system,” aircraft-based sense-and-act technologies, and a mobile aircraft tracking system.” (Clothier R. R., 2011) More specifically, the enabling technologies that support Class G airspace are MATS, “a network-enabled Mobile Aircraft Tracking System, for detection and tracking” of local air traffic. (Clothier R. R., 2011) MATS has multiple sensors supporting “UAS in non-segregated airspace. MATS uses a cost-effective primary radar and cooperative surveillance systems.” (Wilson, 2012) The second enabling technology is the “Vision-based Sense and Act (SAA) – an automated system capable of replicating the See-and-Avoid function of the human pilot.” (Clothier R. , 2017) In the SSP environment, SSA “refers to the capability of a system to detect, track, and resolve potential collisions with other aircraft (A/C) or obstacles on the ground. SSP explores the development of automated aircraft-bases SAA “systems capable of avoiding dynamic obstacles (other A/C) or static obstacles (trees, powerlines, or radio towers).” (Clothier R. R., 2011) The automated Static Obstacle Avoidance (SOA) system is particularly effective at low-altitudes aircraft operations. The last enabling technology is the Automated Separation Management System (ASMS) is designed to reduce workload for the Automated Traffic Management by increasing automation. It consists of three systems; the “Automated Dynamic Airspace Controller (ADAC)”, the “Common Information Network (CIN),and the Predictive Flight Management System (pFMS).” (Clothier R. R., 2011) All the theory would be useless without flight tests to prove the innovative technologies. “An important objective of SSP was to integrate, demonstrate and validate the performance these enabling technologies through a series of eight integrated flight-test activities.” (Wilson, 2012)
Smart Skies Architecture
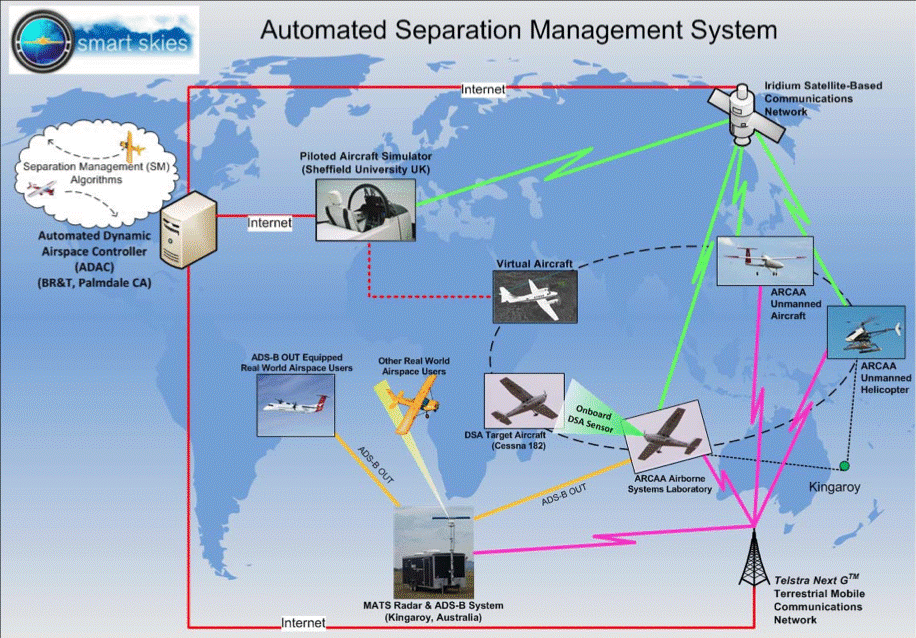
“The SSP architecture diagram is shown in Figure 9-2 The system includes manned and unmanned aircraft, virtual aircraft, public mobile data and Iridium satellite links,” the ADAC and MATS. What is special about the flight testing in SSP “ architecture is that the manned and unmanned flight tests occurred in Kingaroy, Australia, and the SAA control system, the ADAC was in Palmdale, California.” (Wilson, 2012) “All the systems in the SSP architecture are linked to the Internet by the Iridium satellite communication network and a 3G public mobile data network. The Iridium satellites provide global coverage at low bandwidth communication. The public mobile data network provided high bandwidth communications, but in a limited geographic coverage.” (Wilson, 2012)
Flight Test Capability
The Automated Cessna 172R was used for capture of onboard flight and sensor data. It had a “custom flight management systems and display, with input to the onboard autopilot.” (Clothier R. , 2017)
Figure 9-1 SSP Architecture
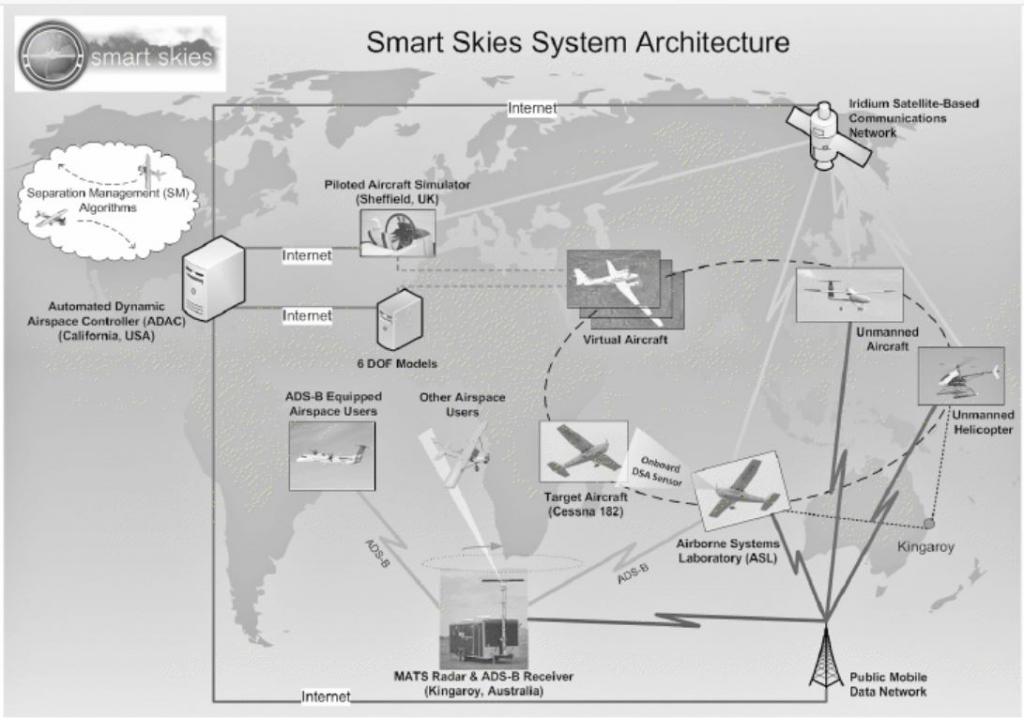
Source: Wilson, M. (2012). The Use of Low-Cost Mobile Radar Systems for Small UAS Sense and Avoid. Sense and Avoid in UAS Research and Applications.
The “Iridium and NextG™ communications facilitated automated telemetry, command and control from anywhere in the world.” (Clothier R. , 2017) Figures 9-2 and 9-3 Show the Cessna 172R cockpit and flying views.
Figure 9-2 Cessna 172R Cockpit

Source: Ricci, A. Cessna 172R/S Skyhawk [cockpit view]. Retrieved from https://www.airliners.net/aircraft-data/cessna-172rs-skyhawk/142 (Viewed September 13, 2018)
Figure 9-3 Cessna 172R

Source: Cessna 172R of BSC Flying School at Khon Kaen-KKC, Thailand, 3/12/16 by Alec Wilson from Khon Kaen, Thailand – HS-BSI, CC BY-SA 2.0, https://commons.wikimedia.org/w/index.php?curid=56933619
Also, in the SSP air was the ARCAA Flamingo UAS. See Figure 9-4.
Figure 9-4 ARCAA Flamingo UAS

Source: Robotronica.qut.edu (2015) Australian Research Centre for Aerospace Automation Display. http://www.robotronica.qut.edu.au/demonstrations/arcaa.php
The “ARCAA Flamingo UAS sports a micropilot 2128 autopilot, 20 kg MTOW, 112 feet wingspan, one-hour endurance, Iridium and NextG™ communications facilitated automated telemetry, command and control from anywhere in the world,” and seventy plus hours of automated operation. (Clothier R., 2017)
The third flying element of the triad was the ARCAA Heli UAS. See Figure 9-5.
Figure 9-5 ARCAA Heli UAS

Source: Clothier, R., Baumeister, R., Brunig, M., Roberts, J., Duggan, A, & Wilson, M. (June 2011). The SBS -1 ADS-B, see: http://www.kinetic.co.uk/DownloadFiles/Assorted/SBS1-eR-ReferenceManual.pdf
The ARCAA Heli UAS package includes a “custom autopilot, FMS and ground station, 12.kg MTOW, 1.8m rotor, 45 minutes endurance, scanning laser and stereo vision sensors and Iridium and NextG™ communications facilitated automated telemetry, command and control from anywhere in the world.” (Clothier R. , 2017)
The Mobile Aircraft Tracking System (MATS)
“Angelov demonstrates the architecture of the MATS subsystem. MATS interfaces with two external systems, a UGCS and the ADAS. MATS was designed to research and demonstrate a field-deployable surveillance system (see Figure 9-6).” (ICAS, 2012)
Figure 9-6 MATS

Source: Wilson, M. (2010) Boeing Research & Technology Australia, A Mobile Aircraft Tracking System That Supports Unmanned Aircraft Operations, 27th International Congress of The Aeronautical Sciences. http://www.icas.org/icas_archive/icas2010/papers/474.pdf
MATS was “designed to support UAS operations in non-segregated airspace. It uses commercial off-the-shelf (COTS) primary radar and tracking system, Automated Dependent Surveillance Broadcast (ADS-B) and filtering, display and communications systems.” (Clothier R. , 2017) MATS also sports a “VHF voice transceiver and a server that performs data fusion and communications management. The UAS flight crew may be located inside the MATS trailer or inside a remote GCS.” (Wilson, 2012)
The MATS Radar System
MATS enables two interfaces to work with SAA. “One interface enables MATS to provide information to the UAS pilot. The radar’s TCP/IP data networking capability allows tracks and plots to be sent remotely to the CGS.” (Wilson, 2012) “This is a pilot/operator in-the-loop SAA system, where MATS provides the sense function and the pilot provides the avoid function by maneuvering the UAS.” (Wilson, 2012) MATS uses a second interface to “provide information about cooperative and non-cooperative aircraft to external systems – the ADAC. In this case the avoid function is automated. ADAC accesses the airspace situation and provides updated flight plans to avoid collisions/conflicts.” (Wilson, 2012)
“A key part of MATS is the primary surveillance radar system. It has two parts; a front-end COT marine radar and a back-end that performs the detection, tracking and display functions. The Furuno radar operates at three pulse rates; 0.07 us for 10.5 m, 1.2 us for 180 m, and 0.3us for an approximate distance of 45 m.” (ICAS, 2012) “The Accipiter® permits multi-target tracking and uses a specially designed Multiple-Hypotheses-Testing (MHT) and Interacting-Multiple-Models tracker (IMM) that locks on to targets that have a Low Radar Cross section (LRC). All radar information is mapped, and multiple layers can be displayed.” (ICAS, 2012)
The MATS ADS-B Receiver
“The ADS-B receiver that MATS used is an SBS-1 from Kinetic Avionics Products Limited. The SBS-1 is portable, low-cost 1090 MHz ADS-B receiver. It provided the tracking and logging of information about ADS-B equipped Aircraft.” (ICAS, 2012)
MATS Performance and Flight Characterization Testing
In March 2010, MATS was an innovative approach to ground-based tracking. The SSP team wanted MATS to detect and accurately track manned and unmanned airspace users and use that information to maintain separation minima. MATS performance had to be superior to ground observers or observers situated in a chase plane. MATS was used to detail responses to failures of navigation systems and to track recovery of the A/C. MATS was a key component in the ASMS.
MATS strength main component was its Primary Surveillance Radar (PSR). SSP team used flight simulations that were augmented with human spotters to compare against MATS’ PSR. The SSP team varied “target cross-sectional area – by using different A/C and target A/C range, velocity, altitude maneuvering and clutter.” (Clothier R. R., 2011)
MATS Results
“MATS radar characterization testing verified that the PSR can track a Cessna 172 in a low clutter environment out to a range of 15 nm.” (Clothier R. R., 2011) Tracking consistency improved at closer ranges. “MATS also tracked A/C flying on designated air routes at ranges between 16 – 20 nm.” (Clothier R. R., 2011) MATS was able to track small fixed-wing UAS targets. MATS data provided additional situational awareness and provided valuable lessons for UAS operators.
Sense-and Act
“Sense-and-Act (SAA) refers to the capability of a system to detect, track, and resolve potential collisions with another A/C or obstacles on the ground.” (Clothier R. R., 2011) SSP explored “development of automated aircraft-based SAA systems capable of avoiding dynamic obstacles (other A/C) or static obstacles (trees, power lines and radio towers).” (Clothier R. R., 2011) The ARCAA C172 was used with full closed-loop control of its navigation systems. SSP performed “controlled experiments involving head-on and over-taking scenarios with a C182. SSP explored range of FoV, image processing and control law configurations.” (Clothier R., 2017)
Dynamic SAA
The challenge of SAA is for the system to meet or exceed human “see-and-avoid” capabilities “provided by a pilot under suitable VFR conditions.” (Clothier R. R., 2011) At all times the SAA must “maintain a visual lookout for other A/C and if necessary, initiate maneuvers to avoid a potential collision scenario.” (Clothier R. R., 2011) Clothier discusses the legal scenarios where SAA must qualify and the limitations of human see-and-avoid abilities. The dynamic Sense-and-Avoid algorithms are discussed in detail in the same paper.
SAA Experiments
Since MATS was designed to “support UAS operations, an interesting place to operate a UAS is a small non-towered airport in Class G space. Some of A/C coming into the airport will carry a VHF. These A/C can easily communicate their position and intent. Unfortunately, a percentage of the A/C will not carry a VHF radio, therefore, coordinating UAS activities will not be possible.” (Wilson, 2012) MATS PSR is the only way to track these A/C. “Non-cooperative aircraft without a VHF represent the most challenging class of airspace user for both manned and unmanned aircraft.” (ICAS, 2012)
Consider a non-cooperative intruder aircraft. If MATS PSR can detect it, “what actions should a UAS pilot take to avoid conflicts with the intruder? So, the scenario that SSP explored was:
- A small UA operating in a non-towered airport,
- UA operations are supported by a PSR whose role is to detect A/C beyond the range of observers at the airport,
- Intruder A/C are non-cooperative and without VHF radio,
- Intruder A/C can arrive from anywhere, anytime and any altitude in class G
- Intruder A/C intentions are unknown (fly-over, sight-seeing, overfly and join a traffic pattern, or land)
- Intruder A/C has a speed advantage over a small UAS. The UAS cannot outrun the Intruder.
The UA may need to move to a new location or change altitude to mitigate the risk of collision.
The airport and USA FAA or Australian Civil Authority sets the AGL rules flying near an airport, city, or populous area.” (Wilson, 2012)
UAS Actions
Wilson (2012) describes four geographic areas with locations oriented toward an intruder A/C that UAS may determine its course of action(s). “Danger – the UA is between the intruder and the airport but outside the circuit area.” The Circuit ring is 3 nm radius from the runway. The far end of the danger zone is 6 nm in radius. For the Transit area, the “UA is outside the circuit area but is the likely transit of the intruder.” It extends to the 6 nm and starts at 3 nm on the same bearing as the intruder. The Hold area is where the UA “is positioned laterally to the current flight path of the intruder.” “Lastly, the Circuit area is generally set by the speed capabilities of the UAS.” (Wilson, 2012) For the Flamingo, the Circuit area was a radius of 3 nm.
“The UAS actions, when the UAS is in each area are as follows:”
AREA UAS COMMAND
Danger “Descend to less than 400 ft AGL and orbit”
Transit “Track to a hold area and orbit”
Hold “Orbit or maintain speed and heading, whichever is safer”
Circuit “Track to the dead side of the circuit at 400 ft AGL and orbit.” (Wilson, 2012)
Three other actions were simulated but discarded generally by the SSP team; land (potential accident on the ground and it becomes a hazard for the intruder trying to land), climb (climb rate is much slower than intruder A/C and fails as avoidance maneuver) and join a traffic pattern (mixing a difficult to see small UAS with larger manned A/C where traffic density may be high.)
SAA Results
The results were a dramatic success. SSP may have been the “first in the world to demonstrate a fully automated real-time onboard collision avoidance using a vision-based SAA system. It used real aircraft, real hardware, and real conditions.” (Clothier R. , 2017) More than eighty data sets were collected. In addition the SSP SAA system demonstrated detection ranges more than 6.421 miles to the closest point of approach (CPA). The SSP solved the problems of vibration compensation and prevention. The SSP team found optimal configurations to minimize MDR and “FAR across a range of atmospheric, cloud, and lighting conditions.” (Clothier R. , 2017) The SSP team proved their Concept of Operations (CONOP) and laid out a plan to use multi-spectral sensors.
Sense-and Act Systems (Static)
“A second challenge to UAS operations is avoiding ground obstacles. This is a risk for fixed-wing aircraft performing at low altitudes (crop dusting), helicopter operations for SAR power-line inspection, radio tower avoidance, winching operations, taxiways obstructions, and animal detection.” (Clothier R. R., 2011) The SSA project called this a Static Obstacle Avoidance system (SOA) and it was “suitable for close range (<30 m) for Rotorcraft UAS operations at low altitudes.” (Clothier R. , 2017) ARCAA researches explored several design components; LIDAR and 2D scanning laser and stereo camera sensor.
SSA SOA Results
“SSP team demonstrated that the SOA successes in an automated, beyond visual range of operation, in an unknown obstacle environment. Sixty flights were completed in a range of single and multi-sensor configurations. LIDAR produced the most reliable avoidance capability with an 84% success rate. It detected trees out to 23m, and a microwave tower out to 18m. The wide (270 degrees) horizontal field of view of the laser allowed it to continue sensing obstacles even when flying alongside of them.” (Clothier R. , 2017)
Automated Separation Management System (ASMS)
Figure 9-7 shows the ASMS architecture.
Figure 9-7 ARCAA ASMS
Source: Clothier, R., Baumeister, R., Brunig, M., Roberts, J., Duggan, A, & Wilson, M, S: (June 2011), CT: ASMS, see: http://www.kinetic.co.uk/DownloadFiles/Assorted/SBS1-eR-ReferenceManual.pdf
The ASMS consists of three basic systems; “The Automatic Dynamic Airspace Controller (ADAC), the Common Information Network (CIN), and the Predictive Flight Management Systems (pFMS).” (Clothier R. R., 2011) The ADAC continuously “maintains situational awareness of the state of the airspace system by receiving aircraft tracking information and changes within the airspace environment (weather, dynamic/ temporary airspace activation.) The ADAC also monitors the airspace system state, and if necessary, transmits recommended control information to cooperative airspace users where there is a potential for a Loss of Separation (LOS).” (Clothier R. R., 2011)
The CIN is the computer backbone of the ASMS. It provides communications (multi-channel) “infrastructure to network aircraft and other sensors (surveillance and weather) to the ADAC. CIN can support multiple redundant and geographically distributed ADAC systems.” (Clothier R. R., 2011)
“The pFMS system enables communication with the ADAC, but all the participating aircraft required a modified flight management system to include predictive capabilities.” pFMS functions include “estimation of the current and future aircraft states (position, attitude, time, and uncertainties), management of multiple communication links within the CIN, receiving, loading and execution of ADAC generated commands, the intelligent management of onboard sensors, and sensor information and display.” (Clothier R. R., 2011)
ASMS Results
The AMSM demonstrated unqualified success for fifty trials “for real aircraft, real communications links, real sensors in complex scenarios involving real and simulated aircraft. It was a truly global systems test providing a completely automated separation service from Palmdale, CA to Queensland, Australia. Trials included non-cooperative aircraft detected using the MATS and SAA systems in mixed-mode separation.” (Clothier R. , 2017) The ASMS was able to ensure “quality of the separation service under variable communications performance factors such as latencies and drop-out. ARCAA researchers believed that their ASMS was the first in the world to autonomously command and control UAS using a civil mobile cellular network.” (Clothier R. , 2017)
The SSP project has spurred hundreds of publications and innovative steps based on the ARCAA team’s results. “A few samples are seen here. Sahawneh, L.R, et.al (2017) wrote about a Ground-Based Sense-and Avoid System for Small Unmanned Aircraft. The paper describes the development of a small frequency-modulated continuous-wave phased-array radar system that provides three-dimensional surveillance volume. Contarino, V.M. et.al (23 May 2011) wrote a paper on All Weather Sense and Avoid System (AWSAS) for all UAS and manned platforms. They discuss a new collision avoidance system that would overcome current FAA stated deficiencies so that military and national security agencies can use the NAS in unfettered mode. Lai, J., Mejias, L & Ford, J.J. (2011) wrote about an Airborne Vision-Based Collision-Detection System. This paper describes the development and evaluation of a real-time, vision-based collision-detection system suitable for fixed-wing aerial robotics.” (Wilson, 2012)
Discussion Equations
- The global market for UAS / UAV is exploding globally. How might terrorist use the UAS as a weapon? What countermeasures would you propose to stop a team or swarm of UAS attacking USA national critical infrastructure?
- What cyber techniques could be used to change parameters in the SAA systems to take control of an enemy UAS.
- Research three papers or peer-reviewed articles on the state-of-the-art SAA components. See if you put the dots together for how the SSP might have influenced the chosen works.
Bibliography
Clothier, R. (2017, April 02). The Smart Skies Project: Enabling Technologies for UAS Operations in Non-segregated Airspace. Retrieved from QUT ePrints: http://eprints.qut.edu.au/40465/3/40465.pdf
Clothier, R. R. (2011). The Smart Skies project. IEEE Aerospace and Electronic Systems Magazine.
ICAS. (2012, December 22). ICAS Archive CD1998-2010. Retrieved from ICAS.ORG: http://www.icas.org/ICAS_ARCHIVE_CD1998-2010/ICAS2010/PAPERS/474.PDF
Wilson, M. (2012). The Use of Low-Cost Mobile Radar Systems for Small UAS Sense and Avoid. Sense and Avoid in UAS Research and Applications.
Readings
Accipiter® Radar UAS Detection and Tracking, DLA: 07172018, https://www.accipiterradar.com/products/safety/drone-uav-detection-tracking-alerting/
Adamy, D. (2001) EW 101 A First Course in Electronic Warfare, Boston: Artech House.
Adamy, D. (2004) EW 102 A Second Course in Electronic Warfare, Boston: Artech House.
Adamy, D. (2009) EW 103 Tactical Battlefield Communications Electronic Warfare, Boston: Artech House.
Adamy, D. (2015) EW 104 EW against a New Generation of Threats, Boston: Artech House.
Adamy, D. (2003) Introduction to Electronic Warfare Modelling and Simulation, Boston: Artech House.
Angelov, P. (2012). Sense and avoid in UAS research and applications. Hoboken, N.J.: Wiley.
Austin, R. (2010) UAVS Design, Development and Deployment, New York: Wiley.
Burch, D. (2005) Radar for Mariners. New York, McGraw-Hill.
Clothier, R. (2011) ARCAA The Smart Skies Project Public presentation
Clothier, R., Baumeister, R., Brunig, M., Roberts, J., Duggan, A, & Wilson, M (June 2011) The
SBS -1 ADS-B, see: http://www.kinetic.co.uk/DownloadFiles/Assorted/SBS1-eR-ReferenceManual.pdf
Contarino. M. et.al (23 May 2011) All Weather sense and avoid system (AWSAS) for all UAS and manned platforms. SPIE Defense, Security, and Sensing Conference paper / event, Orlando, FL. SPIEDigitallibrary.org/conference-proceedings-of-spie
Hubbard, R.K (1998) Boater’s Bowditch, Camden, MA: International Marine.
Mejias, L & Ford, J.J. (2011) An Airborne Vision-Based Collision-Detection System. Journal of Field Robotics 28(2), 137-157 Wiley Publications.
Monahan, K (2004) The Radar Book: Effective Navigation and Collision Avoidance. Anacortes, WA: Fineedge Publications.
Sahawneh, L.R, et.al (5 December 2017) Ground-Based Sense-and Avoid System for Small Unmanned Aircraft, Journal of Aerospace Information Systems. Published online 24 April 2018 by American Institute of Aeronautics and Astronautics, Inc.
SBS -1 ADS-B, see: http://www.kinetic.co.uk/DownloadFiles/Assorted/SBS1-eR-ReferenceManual.pdf
Smart Skies Project, IEEE A&E Systems Magazine.
Clothier, R (2011) Slide Deck on The Smart Skies Project for ARCAA presentation.
Monahan, K (2004) The Radar Book: Effective Navigation and Collision Avoidance. Anacortes, WA: Fineedge Publications.
Toomay, J.C. (1982) Radar for the Non – Specialist. London; Lifetime Learning Publications
