8 Chapter 8: Unmanned Logistics Operating Safely & Efficiently Across Multiple Domains [Lonstein]
Student Learning Objectives:
Increasingly exposed to the reality that automation, artificial intelligence, and unmanned technology, many of us become simultaneously captivated and concerned by the velocity of new products and technologies introduced daily. Students must prepare to function in a world of near-total connectivity. What happens on the ground and in water, above below, requires a homogenous technology ecosystem? The interaction of humans, machines, and the environment will be a critical concept for students to consider in a world where man, machine, and technology operate in concert safely and economically. That interaction will not only require interaction between humans and machines but will also require interaction between humanoids, humans, unmanned technology, and other intelligent technologies operating at different levels. Students will explore how subterranean automation will impact what may happen in space and at each level of our atmosphere.
Once Completed Students Should:
- Understand that automated technology needs to communicate effectively with its primary control systems and other technology, both manned and unmanned, within the same domain.
- Include in their assessment or design of Unmanned Systems, both commercial and military, significant consideration of the interaction of Unmanned technology within a particular stratum of operation and other systems and humans operating at different levels of the physical world, be it underground, on surface waters, underwater, on land in air, space as well as virtual environments.
- Appreciate that the global reach of automated technology will not only require local and national communication and interoperability; they must also function globally and in space where the environment will have a similar, simultaneous operation by manned and unmanned technology from other nations, commercial entities, non-state actors and individuals.
- Plan for and address the inevitable conflict between civilian, commercial, military, or unknown or undetectable unmanned systems.
Yesterday, Today and Tomorrow
This chapter is a product of the lessons learned from co-author Dr. Hans Mumm. In his writings, teachings, and lectures, Dr. Mumm stresses the importance of robust multi-directional command, communication, and control between manned and unmanned technology operating on land or under it, in the air, on water or under it as well as in space. He refers to the concept known by many as Connectivity and automation in transport (“CAT”). Safe Uniform Traffic Management (“UTM”) systems must allow for autonomous vehicles and other intelligent systems such as humanoids to communicate instantly and seamlessly. (European Commission, 2017) As we continue to examine the past, current, and future of unmanned logistics, it is essential to remember Dr. Mumm’s cautionary words.
Commercial delivery by drone is now a reality in many parts of the world. Companies ranging from Fed Ex to United Parcel Service to Amazon and Walmart in the United States currently have or are planning to use autonomous logistics as an essential part of their operations. While in China, food and light package UAV delivery has been in use by companies including SF Express, JD.com, and Ele.me. Similar light package and food delivery by Drone services are underway or anticipated in over 26 different countries globally. Table 8.1 is a partial list of the ongoing and planned parcel and food delivery by drone globally, as compiled by. (Unmanned Aerospace, 2019)
Table 8.1 Partial list of the ongoing and planned parcel and food delivery by drone globally
| Country | Operator/project leader | Type of operation | For more information |
| Australia | Project Wing | October 2017, first trials of goods deliveries by drone to rural Australian customers. Operations later extended to suburban Canberra. | https://www.unmannedairspace.info/uncategorized/alphabet-project-x-delivers-food-pharmaceuticals-australia/ |
| Canada | Drone Delivery Canada | August 2018, Transport Canada approves testing of X1400 cargo delivery drone. | https://www.unmannedairspace.info/uncategorized/regulator-approves-drone-delivery-canada-trial-flights-urban-delivery-system/ |
| China | Ele.me | May 2018, Ele.me starts food delivery by drone in Shanghai. | https://www.unmannedairspace.info/uncategorized/ele-starts-food-delivery-drone-shanghai/ |
| China | JD.com | 2015 – Rural drone deliveries start. | https://www.unmannedairspace.info/latest-news-and-information/rakuten-and-jd-link-to-provide-unmanned-air-and-ground-delivery-services-in-japan/ |
| China | SF Express | March 2018 – SF Express secured China’s first provisional drone operating license to begin deliveries of food within the country’s pilot zones approved by the CAAC.
|
https://www.unmannedairspace.info/uncategorized/chinas-sf-express-given-licence-start-drone-based-transport-network/ |
| Dubai | Costa Coffee | September 2017 – First trials of a coffee drone delivery system | https://www.arabianbusiness.com/industries/technology/379426-costa-coffee-tests-drone-delivery-service-in-dubai |
| Estonia | SESAR GOF program | Parcels deliveries between Helsinki and Tallin planned as part of the SESAR network of demonstrator programs. | https://www.urbanairmobilitynews.com/express-delivery/imminent-gulf-of-finland-sesar-project-to-trial-parcel-deliveries-by-drone/ |
| Finland | SESAR GOF program | Parcels deliveries between Helsinki and Tallin planned as part of the SESAR network of demonstrator programs. | https://www.urbanairmobilitynews.com/express-delivery/imminent-gulf-of-finland-sesar-project-to-trial-parcel-deliveries-by-drone/ |
| Finland | Sky ports and partners | March 2019 – K-Maret deliveries to customers in Vantaa | https://www.urbanairmobilitynews.com/express-delivery/drone-delivery-trials-start-in-finland-with-skyports-and-partners/ |
| France | DPD | In January 2018 trials of drone deliveries were announced for launch between Saint-Maximin-La-Sainte-Baume and Pourrières. | https://www.unmannedairspace.info/uncategorized/special-report-delivery-drone-six-drone-delivery-programmes-started-europe/ |
| Germany | Emqopter | February 2019 – Trials began delivering pizza and industrial parts by drones Wurzburg (Germany)-based drone-technology company Emqopter.
|
https://www.unmannedairspace.info/uncategorized/germanys-emqopter-delivering-pizza-industrial-parts-deliveries-drones/ |
| Iceland | Aha and Flytrex | Commercial drone delivery flights began in Reykjavik from 2018, by operator Aha and Flytrex. | https://www.unmannedairspace.info/utm-industry-leader-interview/flight-drone-least-risky-part-process-maron-kristofersson-aha/ |
| Ireland | A Post and Sky Tango | In July 2018 – A Post starts trials of off-shore drone delivery flights.
|
https://www.unmannedairspace.info/uncategorized/irelands-post-autonomous-drone-mail-delivery-flights-start/ |
| Indonesia | JD.Com | Drone delivery trials began with JD.com. | https://www.unmannedairspace.info/uncategorized/chinese-retailer-jd-com-starts-first-drone-delivery-flights-indonesia/ |
| Japan | Rakuten | January 2019 – Drone delivery packages in rural Japan. | (https://www.unmannedairspace.info/uncat).egorized/rakuten-start-drone-package-deliveries-rural-japan-april-news-report). |
| Singapore | Airbus Skyways | February 2018 – Airbus Skyways Singapore parcel delivery drone makes first flight.
|
https://www.unmannedairspace.info/uncategorized/airbus-skyways-singapore-parcel-delivery-drone-makes-first-flight/ |
| Singapore | Airbus and Wilhelmsen | March 2019 – the two companies start shore-to-ship drone deliveries | https://www.urbanairmobilitynews.com/express-delivery/airbus-wilmhelmsen-start-shore-to-ship-drone-deliveries-in-singapore/ |
| South Korea | Korea Post | Remote mail deliveries to start in 2021. | https://www.unmannedairspace.info/uncategorized/korea-post-develops-utm-system-will-start-remote-mail-drone-deliveries-2021/ |
| Switzerland | Mercedes Zurich Matternet and siroop | September 2018 –Mercedes Zurich drone delivery program starts.
|
https://www.unmannedairspace.info/uncategorized/mercedes-zurich-drone-delivery-programme-reaches-100-flights/ |
| UK | Vodafone | Strat of 4G mobile phone delivery trials in Scottish islands. | https://www.unmannedairspace.info/uncategorized/vodafone-makes-uks-first-4g-mobile-network-drone-delivery/ |
| USA | Flirtey | March 2019 – BVLOS drone delivery flight trials start in Reno. | https://www.urbanairmobilitynews.com/express-delivery/flirtey-to-conduct-bvlos-drone-delivery-flights-in-reno/ |
| USA | Project Wing | August 2018 – in Virginia, Project Wing starts BVLOS urban area drone delivery trials,
|
ttps://www.unmannedairspace.info/uncategorized/project-wing-starts-bvlos-urban-area-drone-delivery-trials/ |
| USA | Flytrex | October 2018 – drone deliveries to King’s Walk Golf Course in Grand Forks, North Dakota | https://www.flytrex.com/projects/north-dakota/ |
| USA | FAA Integration Pilot Program (IPP) project. | Herndon, VA – the program will facilitate package delivery in rural and urban settings. | https://www.faa.gov/uas/programs_partnerships/integration_pilot_program/lead_participants/ |
| USA | FAA Integration Pilot Program (IPP) project. | Loveland, OH – Workhorse Group Inc.’s Horsefly truck-launched Autonomous Drone Package Delivery System is now making package deliveries to homes in the Cincinnati area | https://www.faa.gov/uas/programs_partnerships/integration_pilot_program/lead_participants/ |
| USA | FAA Integration Pilot Program (IPP) project. | for Holly Springs, North Carolina – goods deliveries to resident backyards | https://content.dji.com/drones-for-good-drone-delivery/?utm_source=linkedin&utm_medium=social&utm_campaign=D4G-delivery |
| USA | FAA Integration Pilot Program (IPP) project. | Memphis-Shelby County Airport Authority, Memphis, TN: inspection of FedEx aircraft and package delivery. | https://www.faa.gov/uas/programs_partnerships/integration_pilot_program/lead_participants/ |
Source: (Unmanned Aerospace, 2019)
While there are many reasons for optimism based upon unmanned logistics’ initial global adoption, as we can see in Table 8.1, widespread implementation of autonomous technology in the supply and delivery chain remains in its infancy. Challenges such as payload capacity, environmental considerations, UTM, and overall CAT technology are a few of the challenges which must be met before widespread automated logistics operations can become a reality of our everyday lives.
Yesterday
The noted Scientific Historian James Burke wrote in the 1978 book “Connections: Alternative History of Technology” that “When you read a book, you hold another’s mind in your hands.” “Why should we look to the past in order to prepare for the future? Because there is nowhere else to look.” (Burke, 1978) When introducing new technology to society, there is always a significant dose of wonder, futurism, and promise, which helps drive adoption. Once the theoretical starts its metamorphosis into reality, there will inevitably be challenges and consequences that were not envisioned but need resolution to achieve adoption at scale.
In book one of this series, we examined the delicate balance between innovation and regulation, too much of one can negate the other’s value and vice versa.
“Unlike the introduction of the railroads in in the 1800’s, automobiles presented a greater challenge. Trains and trolleys were limited to travelling on rails, which made the design of infrastructure and regulation of operation less challenging. By 1920 it was clear that affordable automobiles were the conveyance of the future. People were migrating away from the mass transit staples of trains, busses and trolleys, and opting instead for personalized on-demand, motorized transportation.” (Nichols, Mumm, Lonstein, Ryan, & and Carter, 2018)
When considering the widespread introduction of autonomous transportation, the challenge of maintaining order, safety, reliability, and efficiency become far more complex. While they were all incredibly disruptive and transformational technologies, the automobile, mechanically powered sea transport, submarine, subterranean, air and space travel were not simultaneously introduced into day-to-day life. When it comes to unmanned operation we are witnessing the near-simultaneous introduction of technology at every level of our environment and beyond.
One If by Land or beneath it
In his 2008 book Fighting Traffic, Peter D. Norton conducted an extensive analysis of the many considerations which contributed to the development of rules and regulations for the operations of automobiles on streets previously used for pedestrians and animal-drawn traffic. Almost immediately accidents and death soared largely due to the fact in the early 1900’s there were few or no laws for regulating motorized ground transport, many pedestrians were caught by surprise due to the noise, speed and a general public unfamiliarity with the automobile. Norton observed the tension caused by the introduction of this new technology.
“Most historical studies in the social construction of technology examine distinct artifacts that can be produced in quantity and that need not be shared. Streets are different. A mother cannot conceive of a street as a playground for her children while a motorist thinks of it as a path for driving at speed—at least not for long. The incompatibility of different constructions of a shared technology raises the stakes for relevant social groups. In a shared system, when a new construction becomes dominant, one group cannot easily secede from the prevailing denomination into a dissenter group where the minority construction is preserved.” (Norton, 2008)
Over the last 125 years, the automobile has gone from something that was primarily for the elite to a ubiquitous technology that most adults in developed nations can either own or access regularly. It has become a staple of modern life. When Henry Ford introduced mass assembly lines in the early 1900s, automobiles became more affordable, and so the number of vehicles operating on roadways grew exponentially. With increased volume came more significant interaction between vehicles, pedestrians, animals, and the environment.
With more frequent operation came more interaction, more mishaps, accidents, and sadly deaths. In the 1950s and ’60s, it became apparent something had to change if “a car in every garage” was to become the American dream instead of a nightmare.
1963 and 1964 represented a tipping point of traffic management and automobile safety in the United States. In just one-year automobile, fatalities rose and astronomical ten percent to 47,700 deaths. In response, the Highway Safety Act of 1966 was passed by Congress. Significant safety enhancement followed as Figure 8.1 depicts, between 1966 and 2013 the fatality rate per 100 million miles went from over 5 to just over 1 in 2013. (Federal Highway Administration, 2017)
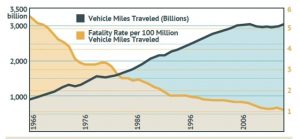
Figure 8.1 Vehicle Fatality Rate per 100 Million miles Travelled
Source:(Federal Highway Administration, 2017)
The success achieved in terms of vehicle safety is impossible to tie to any particular strategy, practice, or regulatory scheme. Instead, it is a multidisciplinary approach that allowed a vast reduction in automobile-related fatalities. The Four E’s of Engineering, Education, Enforcement, and Emergency response is primarily credited with the overall success and are essential components of Uniform Traffic Management. (Federal Highway Administration, 2017)
Land-based autonomous transportation is limited to automobiles, busses, and trucks; many new technologies continue to develop, revolutionizing land-based locomotion. Currently, in China, an Autonomous Rail Transit (ART) system began operations in 2018. According to reports, the ART system operates on long-lasting, quick charging batteries and can travel up to 25 miles at up to 43 mph. The ART system can charge at stations along the route or the end of the line in approximately 10 minutes. It also runs on rubber wheels and virtual pathways using sensors so that no fixed rails or tracks are needed, and flexibility of routing can be dynamic. ART’s are seemingly the “next big thing” in metropolitan transportation. (Railway-News, 2019)
Autonomous rail systems are not merely limited to inner-city commuter transportation.
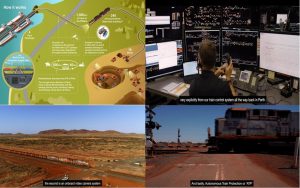
Figure 8.2 Rio Tinto – Hitachi Autonomous Freight Train
Source:(Hitachi Corporation, 2020)
The first large-scale autonomous freight rail system commenced operation in the Pilbara region of Western Australia. The Rio Tinto Railway System, in collaboration with Hitachi Corporation, developed what they call the Auto-Haul™ System. According to its Case Study, Hitachi & Rio Tinto claim “more than 7.5 million train kilometers operated fully autonomously – without the need for an onboard driver – all while increasing safety outcomes.” (Hitachi Corporation, 2020)
Recently a new reality has begun to evolve where an autonomous technology operates below the earth’s surface. Earlier in 2020, the Defense Advanced Research Projects Agency organized and conducted the Subterranean Challenge Urban Circuit (SubT). According to DARPA:
“The SubT Challenge Systems and Virtual competitions aim to create community of multidisciplinary teams from wide-ranging fields to foster breakthrough technologies in autonomy, perception, networking, and mobility for underground environments. The Tunnel Circuit took place in August 2019. The Cave Circuit is planned for August 2020, and the Final Event incorporating all three underground environments is targeted for August 2021.” (Defense Advanced Research Projects Agency, 2020)

Figure 8.3 Prototype DARPA SubT
Source: (Carnegie Mellon University, 2019 )
Another autonomous technology is operating in the subterranean space in the mining and tunnel construction industries. One recent example can is in Mali, Africa. According to AZO Mining, the Syama Mine has engaged in a three-year partnership with Sandvik to provide:
Syama with its full suite of proven autonomous equipment and digital solutions, some of which include their full fleet of Sandvik TH663i trucks, DL421 autonomous drills, and fully autonomous loaders. Syama will also utilize Sandvik’s OptiMine®3D Mine Visualizer, which will provide Resolute Mining workers with a real-time three-dimensional (3D) model of the entire mining environment that can be accessed from remote locations. One of the key advantages associated with the visualization system is that users can effectively analyze and immediately respond to events occurring in the mining environment. The system also allows users to efficiently plan future mining activities and operations, investigate problematic areas of the mine and track the development of the mine over time.” (Cuffari, 2019)
Maritime traffic management has also seen a historical arc where a once non-existent and mostly an ad hoc reaction to disasters cost thousands of lives. History is replete with maritime disasters, like the Fleet of Kubla Khan, The Spanish Armada of the 1500s and the R.M.S. Titanic in 1912, related to the sea and environmental conditions or the inability of the crews to navigate, or ships to withstand the conditions. (Marine Insight, 2019) Others, such as the S.S. Andrea Doria, M.S. Stockholm, and the SS Admiral Nakhimov, sank due to collisions with another surface vessel. Finally, the Submarines USS Gatto and the U.S.S.R. K-19 collided approximately 200 feet below the surface. Both survived but were severely damaged. (Mizokami, 2017)

Figure 8.4 R.M.S. Titanic Sinking 2012
Source: (National Geographic)
Most of us are familiar with the R.M.S. Titanic’s ill-fated maiden voyage in April of 1912, where over 1500 passengers and crew died in icy waters of the North Atlantic. While the reality is awful, Hollywood has, over the years, both romanticized and dramatized the events on that fateful night. Why did the new ship need to set a speed record? Why had none of the greatest maritime engineers in the world discovered the fatal design flaw of having watertight compartments in its hull, which could be sealed off in case of damage to the hull and thereby making the vessel theoretically “unsinkable.” Sadly, in reality, a design flaw did not account for the fact that seawater after a hull breach could flow over the compartments, into the next thereby making the ship extremely vulnerable to sink in the event of a collision. (Bassett, 1998)
The disaster left the world in shock and immediately calls for investigation and regulation grew. As a result, the International Convention for Safety of Life at Sea (“SOLAS”) became law. SOLAS is currently under the aegis of the International Maritime Organization who has modified the Convention numerous times in the century following the sinking to the Titanic. (International Maritime Organization, 2020)
Numerous other maritime disasters have occurred over the years, many of which involved collisions between vessels or environmental obstacles such as icebergs, pack ice, the seafloor, and reefs. As the seas grew crowded, vessels became larger, faster, and ports, canals, and navigational straights became congested, the risk of disaster grew. To that end, Robert Frump, author of “until the Sea Shall Set Them Free,” and Pulitzer Prize nominee, said, “Changes occur only when there is a meaningful disaster.” “I think that most people will tell you that changes in marine safety are almost exclusively disaster-driven,” agrees Dr. Josh Smith, a professor at Kings Point and interim director of the American Merchant Marine Museum.” (Keefe, 2014)

Figure 8.5 Panama Canal Backup
Source: (Today Panama, 2015)
Like the automobile, regulation of nascent technology can be a painfully slow process, not only in terms of time but also in the cost of human lives and the environment. History of regulation shows that with time, technology, and safety improvements, and to that end, common-sense regulation is the best way to protect the public, crews, and the environment while allowing for technology to advance. Students should note that the history of maritime safety and traffic management closely parallels that of the automobile. Both technologies vastly improved with the advent of mechanical propulsion and the advances made during the early to mid-1900s.
While subterranean automation is just becoming a reality, Unmanned Underwater Vehicles have a long history of functioning beneath the waves. In 1957 the Applied Physics Lab of the University of Washington developed the Special Purpose Underwater Research Vehicle (SPURV). The SPURV was controlled remotely by acoustic communication. (Gafurov, 2015)
Three if by Air or in Space
A few short years ago, this section would be limited to air traffic. It is now clear that autonomous technology is and will have an increasing role within and beyond Earth’s atmospheric airspace. In Chapter 2 of Unmanned Aircraft Systems (UAS) in the Cyber Domain, I wrote extensively about the history of the regulation of new technologies such as automobiles and aircraft. (Nichols, Mumm, Lonstein, Ryan, & and Carter, 2018) While autonomous vehicles continue to rapidly improve and evolve, so too does traffic. What was once considered acceptable UTM in controlled and unregulated airspace has now become less efficacious given the increasing proliferation of UAS in global airspace.
While autonomous vehicles continue to improve and evolve rapidly, so too does traffic. What was once acceptable UTM in controlled and unregulated airspace has become less efficacious given the increasing proliferation of UAS in global airspace.
As a case in point, the issue’s complexity has become and why regulation alone will not ensure that safety or reliability comes from personal experience. On June 29th, 2019, as a passenger on United Airlines Flight 1849 from Newark, New Jersey, to Atlanta, Georgia. Shortly after takeoff and well below 10,000 feet in altitude I noticed an odd and irregular series of maneuvers far different than those many travelers are familiar with as noise avoidance maneuvers and operation at major metropolitan airports. (Port Authority of New York & New Jersey, 2020)
It was a sunny summer day with mostly clear skies and a bit of the haze associated with metropolitan airspace. Since the airspace is complex and crowded with three of the busiest airports in the nation nearby, I like to film takeoff and landing since one never knows what you will see. Towards the east, I saw a small Drone in between my flight and the aircraft depicted
further to the east, just at the time, the odd maneuver occurred.
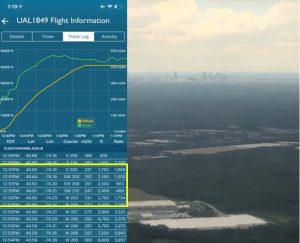
Figure 8.6 Photograph of departure from Newark Airport June 29, 2019
Source: (Lonstein, Takeoff Photo Newark to Atlanta June 29, 2019, 2019)
I recounted the event in a Forbes.com article entitled “Are Drone-Aircraft Collisions a Real Threat to Airline Passengers and Crews?” in August of 2019. (Lonstein, Are Drone-Aircraft Collisions A Real Threat To Airline Passengers and Crews?, 2019)
Merely suggesting the risk of small, unregulated UAVs operating in skies where other commercial traffic also operates is a recipe for collision did not sit well with the “hobbyist,” or consumer drone manufacturers. The article’s central premise was to point out that even if there are laws and regulations in place to deal with traffic management of unmanned aerial vehicles, it does not necessarily equate that operators will obey the laws much less be aware of them. This more significant challenge today is that the barriers to individual ownership, such as price, availability, and difficulty of operation, served as a natural limitation no longer exist.

Figure 8.7 Major League Drone Delay
Source: (Fox Sports, 2020)
The trend of smaller and smaller UAS also presents a more significant regulatory issue. On August 4, 2020, a Major League Baseball game between the Minnesota Twins and the Pittsburgh Pirates was delayed due to a drone’s appearance over the stadium. It is the first known baseball “drone delay.” (Fox Sports, 2020)
While controlled airspace and large public venues are a daunting challenge, unmanned aerial traffic management is not strictly limited to the earth’s atmosphere. According to a 2019 report from the United States Defense Intelligence Agency entitled Challenges to Security in Space, many instances are cited where near-collisions and actual collisions between manned and unmanned space vehicle and debris. According to Appendix “A” of the report:
“Between 1998 and 2017, the International Space Station, which is in LEO, has maneuvered at least 25 times to avoid potential orbital collisions. With an expected increase in large constellations of satellites and space debris, there is higher potential for satellite collisions, particularly in LEO.” (United States Defense Intelligence Agency, 2019)
Are we prepared for Autonomous Logistics?
The answer lies with all of us. Many of today’s students will find themselves confronted with the challenge, which has confounded many technologists over the past few centuries. What is sufficient to handle today’s technological requirements may be outdated tomorrow, and by “tomorrow,” that means the next date on the calendar. The speed with which autonomous technology develops seemingly leads to new products and discoveries each day. What was an acceptable form of military defense on August 5, 1945, was obsolete the next day? What changed? That was the day that the first atomic bomb dropped on Hiroshima, Japan. (British Broadcasting Company, 2020)
What should be done?
Following the suggestions of Dr. Mumm to ensure an interconnected Multi-Domain across autonomous technology platforms makes much sense. A World that relies upon Multi-Domain Autonomous systems is currently evolving. When considering how best to manage such complex systems, the key to understanding how best to maximize safety and efficacy is communication.
As with much autonomous technology, the military is often a driver of innovation in no small part based upon its need to function on short notice anywhere in the world. In a recent White Paper by Martin Kahn and Sean Thatcher on behalf of Lockheed Martin, the authors summarized the design as follows:

Figure 8.8 Lockheed Martin JADO
Source: Collaboration Strategy (Kahn, 2020)
“Lockheed Martin’s Integrated JADO Collaboration Strategy provides a JADO architectural framework for future combat operations in a joint and coalition environment. Our approach is an open architecture solution designed to incorporate existing systems and new technologies. Spectrum dominance capabilities provide undetectable communications in the HCE as well as a fused common operating picture.” (Kahn, 2020)

Figure 8.9 Multi-Domain Traffic Management
Source: (Canstock Photo, Inc., 2020)
Transitioning from the battlefield to static civilian environments provides an opportunity to create Multi-Domain Autonomous Logistical systems, which will allow for commerce to benefit safely and effectively from automation. In recent years, the debate on how best to accommodate autonomous vehicles on highways has narrowed, at least for the time between two models. The first, known as Self Reliant Vehicles (SRV), uses sensors to create awareness of its operating environment. The sensors include technologies such as “Light Detection and Ranging (LiDAR) and Radio Detection and Ranging (RaDAR) sensors that provide visual and locational data to the car, and possibly to other similarly equipped cars.” Recently, the focus has shifted to technology that does not solely rely upon in-vehicle sensors alone; rather, it relies upon the Vehicle to Infrastructure regime or (V2I). (Ray, 2019)
While some might think it makes sense to build a communication and traffic management system for all forms of autonomous transport, very little Multi-Domain technology exists. A significant amount of study needs to occur with adequate foresight into how all autonomous systems can communicate.
That means new roadways, airports, seaports, and other infrastructure must be capable of supporting the autonomous operation; they must also be pre-fitted with the necessary technology to allow data and communication flow on, above and below simultaneously.
Only having traffic management for UAV’s will quickly prove to be inadequate and dangerous as soon as multi-domain vehicles enter service. UAV’s which are capable of operating on land and in the sky is already a reality. If there is no way to communicate, navigate, and safely operate on land, sky, and water in a safe, efficient, and commercially viable manner. The promise of autonomous technology may never be a reality. As this chapter is written, SpaceX, NASA, and similar technology are repeatedly proving the efficacy of unmanned vehicles operating in multiple domains. Traveling from land to Low Earth Orbit transitioning back into the earth’s atmosphere and landing on the sea or land is now a reality. With the success of SpaceX and others, the seas, skies, and space may quickly become much more crowded and require traffic management in order to achieve commercial viability. On August 7, 2020, a Falcon-9 Unmanned Rocket took off from Cape Canaveral, Florida, and successfully deployed 57 Starlink™ internet-beaming satellites. After delivering its payload, the rocket successfully landed in the sea. One mission, five domains, Land, Air, Space, then back to Air, finally landing at sea.

Figure 8.10 SpaceX Falcon 9 Takeoff August 7, 2020
Source: (space.com, 2020)
Conclusions
While the SpaceX mission enjoyed the luxury of governmental authorities maintaining adequate traffic control, when thousands of unmanned logistical activities are co-occurring, the challenge becomes exponentially more challenging. Multiple domains, multiple nations, and multiple autonomous vehicles must function in harmony with each other, manned and human traffic in each domain, not to mention the weather and environmental interaction. With subterranean and underwater automation, the challenge seems daunting. Uniform traffic management systems for effective logistics must work across the globe in multiple languages and with security. Any network is vulnerable to attack. Network design is far too broad and complex to examine in this chapter; however, it is a subject that must be in the front of all of our minds if the promise of autonomous logistics is to come to fruition.
Questions for students to consider
- In the event of war, terror attack, dispute, embargo or other what is your vision to best mitigate the risk of calamity should the global UTM system lose functionality?
- What type of UTM network would you design in order to minimize to the greatest extent possible security flaws and inevitable DDOS and other attacks? Assuming the success of such attacks how would you harden the system and provide for multiple redundant capabilities not dependent on each other to function?
- Should the global UTM system be operated by nations individually under agreed upon rules, or operate under a multinational body such as the United Nations or a similar organization?
- Who will pay for this massive infrastructure investment? If paid for solely by governments and private companies using the technology are profiting from it, how would you recoup the investment?
- If, after much study, planning and debate individual nations decide to establish their own independent UTM systems, will it be possible to reliably and safely operate autonomous logistics between nations? If so, how would the system operate secretive or repressive nations such as North Korea and Iran?
References
Bassett, V. (1998). Causes and Effects of the Rapid Sinking. Madison: University of Wisconsin.
British Broadcasting Company. (2020, August 6). Hiroshima bomb: Japan marks 75 years since nuclear attack. Retrieved from BBC News: https://www.bbc.com/news/world-asia-53660059
Burke, J. (1978). Connections. Boston: Little Brown.
Canstock Photo, Inc. (2020, August 7). 3 Domain UTM Illustration. Canstock Photo, Inc.
Carnegie Mellon University. (2019 , August 12). Carnegie Mellon/Oregon State Robotics Team Prepares For Subterranean Challenge. Pittsburgh, PA, USA.
Cuffari, B. M. (2019, December 20). Syama: The First Fully Automated Mine. Retrieved from azomining.com: https://www.azomining.com/Article.aspx?ArticleID=1519
Defense Advanced Research Projects Agency. (2020, April). Subterranean Challenge Urban Circuit. Retrieved from darpa.mil: https://www.darpa.mil/about-us/subterranean-challenge-urban-circuit
European Commission. (2017). Connected and Automated Transport – Studies and Reports. Brussels: European Commission.
Federal Highway Administration. (2017). Road Safety Fundamentals. Washington: United States DEpartment of Transportation.
Fox Sports. (2020, August 4). DRONE CAUSES DELAY IN PIRATES-TWINS. Retrieved from foxsports.com: https://www.foxsports.com/stories/mlb/drone-causes-delay-in-pirates-twins
Gafurov, S. A. (2015). Autonomous unmanned underwater vehicles. Amsterdam: Elsevier, LTD. Retrieved from sciencedirect.com.
Hitachi Corporation. (2020, January). Robot Trains: How Hitachi Rail Tech Enabled Global First in Heavy Freight Rail Automation . Retrieved from siocial-innovation.hitachi.com: https://social-innovation.hitachi/en/case_studies/robot-trains/
International Maritime Organization. (2020, July 23). International Convention for the Safety of Life at Sea (SOLAS), 1974. Retrieved from International Maritime Organization : http://www.imo.org/en/About/Conventions/ListOfConventions/Pages/International-Convention-for-the-Safety-of-Life-at-Sea-(SOLAS),-1974.aspx
Kahn, M. &. (2020, June). Integrated Joint All-Domain Operations (JADO) Collaboration Strategy Full Spectrum Operations. Retrieved from Lockheed Martin.com: https://www.lockheedmartin.com/content/dam/lockheed-martin/aero/documents/mdo/Integrated_JADO_Solution_Whitepaper.pdf
Keefe, P. (2014, June 20). The history of marine safety is written in blood. Retrieved from Maritime Reporter and Engineering News: https://www.marinelink.com/news/maritime/robert-frump
Lonstein, W. (2019, August 14). Are Drone-Aircraft Collisions A Real Threat To Airline Passengers and Crews? Retrieved from Forbes.com: https://www.forbes.com/sites/forbestechcouncil/2019/08/14/are-drone-aircraft-collisions-a-real-threat-to-airline-passengers-and-crews/#945a3e454f47
Lonstein, W. (2019, June 29). Takeoff Photo Newark to Atlanta June 29, 2019. Newark, NJ.
Marine Insight. (2019, October 4). 15 Famous Shipwrecks in the World. Retrieved from Marine Insight : https://www.marineinsight.com/maritime-history/10-famous-shipwrecks-in-the-world/
Mizokami, K. (2017, June 21). A Brief History of U.S. Navy Ship Collisions. Retrieved from Popular Mechanics: https://www.popularmechanics.com/military/navy-ships/a27021/ship-collisions-us-navy-history/
National Geographic. (n.d.). Sinking of the Titanic. Retrieved from National Geographic.
Nichols, R. K., Mumm, H. C., Lonstein, W. D., Ryan, J. J., & and Carter, C. (2018). Unmanned Aircraft Systems (UAS) in the Cyber Domain: Protecting USA’s Advanced Air Assets”. Manhattan, KS: NPP Books.
Norton, P. D. (2008). Fighting Traffic. Cambridge: The MIT Press.
Panama Today. (2015, October 17). Panama Canal traffic jam. Retrieved from Today Panama: http://todaypanama.com/panama-canal-traffic-jam/
Port Authority of New York & New Jersey. (2020, July 30). Aircraft Noise Engagement History. Retrieved from Aircraft Noise – Port authority of NY & NJ: https://aircraftnoise.panynj.gov/aircraft-noise-engagement-history/
Railway-News. (2019, July 24). China’s Virtual Rail Transit System Put Through Its Paces in Doha. Retrieved from Railway-News.com: https://railway-news.com/virtual-rail-transit-system-doha/
Ray, K. (2019, Winter). Driverless Roads. Retrieved from National Affairs: https://www.nationalaffairs.com/publications/detail/driverless-roads
space.com. (2020, August 7). SpaceX launches 57 more Starlink satellites, lands rocket at sea. Retrieved from space.com: https://www.space.com/spacex-starlink-launch-rocket-landing.html
Today Panama. (2015, October 17). Panama Canal Traffic Jam. Retrieved from Today Panama: http://todaypanama.com/panama-canal-traffic-jam/
United States Defense Intelligence Agency. (2019). Challenges to Security in Space. Washington: United States Government.
Unmanned Aerospace. (2019, April 7). Drone delivery operations underway in 27 countries. Retrieved from Unmanned Aerospace: https://www.unmannedairspace.info/latest-news-and-information/drone-delivery-operations-underway-in-26-countries/
