1 Chapter 4 Underwater Autonomous Navigation & Other UUV Advances [Mumm]
Student Learning Objectives
The student will gain knowledge of the concepts and framework as it relates to how underwater vehicles navigate as well as explore the current and proposed advances in the unmanned underwater vehicle (UUV) arena.
The student will be able to:
- Understand the basic navigation techniques used to operate in underwater environments
- Gain an overview of how UUVs can safely operate around ports and manned vehicles.
- Consider new technologies being developed for use in UUVs and how that may impact UUV future uses
- Examine the direction of UUV technology to assist in exploring its intended and unintended uses and the consequences of these uses on the ocean and humankind.
History of Undersea Navigation-What is it, and Why Does it Matter?
The ability to navigate using roads, bridges coupled with maps, Global Positioning System (GPS), and the ability to see where to go are all modalities that are limited if not unavailable to underwater vehicles. We take for granted that we can see and sense our surroundings, even at night we simply turn on a light to illuminate our path. Underwater environments do not enable the use of so many modalities, and thus, submarines and UUVs are quite literally navigating blindly most of the time. Unlike other forms of transportation and movement, most submarines and UUVs do not have windows. These vehicles must rely on sensors to guide their path to and from a destination. Near the surface, sailors can use a periscope, which was invented in 1902 by Mr. Simon Lake. Periscopes “are long tubes that have mirrors inside. The mirrors reflect images so sailors can see above the water.” (Joanne, 2019)
Modern-day submarines use a “fiber optic imaging mast (which) sits in the sail outside the hull and sends electronic images to the crew…No periscope makes the hull of the ship stronger because it does not need to have an opening to poke through.” (Joanne, 2019)
Sonar, which is short for sound, navigation, and ranging, detects undersea objects by transmitting powerful sound waves through the ocean and interpreting the returning signals that bounce off objects. Sonar systems have two modes, active and passive,
“In active sonar, the system emits a pulse of sound, and then the operator listens for echoes. These sonar waves can be varied in frequency and strength in order to allow it to distinguish targets of interest, and sonar can be used as a means of identification of an object as well as offering the submarine or UUV the ability to have its own unique identifier. In passive sonar, the operator listens to sounds emitted by the object one is trying to locate” (Discovery of Sound in the Sea, 2020).
The challenge with active sonar is that by sending out continuous signals through the water, the position of the submarine or UUV can be easily determined. Passive sonar systems simply listen without sending out active signals as “Ships, submarines, marine mammals, and fish all make noise, and this noise can be used by passive Sonar systems to locate them, in much the same way humans use their ears to locate someone speaking in a room (Discovery of Sound in the Sea, 2020).
Submarines and UUVs use “inertial guidance systems use gyroscopes to track the sub’s motion from a fixed starting point. These systems are accurate for up to 150 hours of operation. Then they must be realigned with surface navigation systems such as GPS, radar, or satellite.” (Joanne, 2019). Figure 4.1 illustrates a typical gyroscope used in inertial navigation systems.
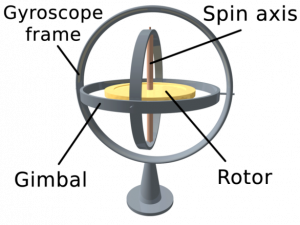
Figure 4.1: Traditional Gyroscope
Source: (Joanne, 2019)
A gyroscope is a wheel or disk mounted to spin rapidly around an axis that is free to turn in various directions. (Joanne, 2019).
A ships inertial navigation systems (SINS) can detect a change in the submarines geographic position (a move east or north, for example), a change in its velocity through the water (speed and direction of movement) and a change in its orientation (rotation about an axis). It does this by measuring the linear acceleration and angular velocity applied to the system. Since it requires no external reference (after initialization), it is immune to jamming and deception. (Navigating a Submarine: Time and Navigation-The Untold Story of Getting from Here to There, 2020).
An inertial navigation system (based on Newton’s second law) is made up of several gyros with accelerometers connected to one or more computers. The initial coordinates (location on the planet) are programmed in at dockside, and the inertial navigation systems is aligned before the submarine is launched. Once the sub is launched, the inertial navigations systems senses the acceleration and movements and reports this information to the computer that can calculate to within one to two nautical miles where the submarine is at on the planet. Generally, an accuracy of 1–2 NM should be acceptable with an accuracy of 1 NM (nautical mile) in 24 hours being a reasonable navigational drift error rate. The submarine can also surface to update its GPS fix or use any landmarks to correct its last known position. (Nobahari, 2017).
USS Alabama has three navigations systems, as seen in Figure 4.2. The three systems are the “ship’s inertial navigation system (SINS), a Loran-C receiver, and a Transit satellite receiver system for correcting the inertial system. It has since been fitted with a GPS receiver and the Trident II navigation system.” (Navigating a Submarine: Time and Navigation-The Untold Story of Getting from Here to There, 2020).

Figure 4.2: Parts of the USS Alabama Navigation System
Source: (Navigating a Submarine: Time and Navigation-The Untold Story of Getting from Here to There, 2020)
Minute errors in the measuring capabilities of the accelerometers or in the balance of the gyroscopes can introduce large errors into the information that the inertial guidance system provides. These instruments must, therefore, be constructed and maintained to strict tolerances, carefully aligned, and reinitialized at frequent intervals using an independent navigation system such as the global positioning system (GPS) (Inertial guidance system, 2020).
Current inertial navigation systems, such as those used on commercial jetliners, booster rockets, and orbiting satellites, calculate their turning rates measured by ring laser gyroscopes (see Figure 4.3) or by fiber-optic gyroscopes. These laser gyroscopes can be purchased on the open market for less than four thousand dollars. (Inertial guidance system, 2020).

Figure 4.3: Ring Laser Gyroscope
Source: (Inertial guidance system, 2020).
Active motorized precision laser ring gyroscope for inertial navigation system (Laser Ring Gyroscope for Inertial Navigation System , 2020)
Historically, there have always been navigational issues with submarines and the underwater environment. UUV navigation has been particularly hampered due to power requirements and the overall difficulty of communication signals/wave forms traveling through the water, in addition to interpreting caverns and signal instability or interruption from ocean sea life. With the introduction of smaller, more efficient inertial navigation systems, GPS “suitable satellite communications, compact antennas, more capable underwater sensors, and powerful digital information processing, many other barriers to implementing quite ambitious UUV capabilities have fallen away” (Whitman, 2002). Some UUVs are now using fixed acoustic transponders to assist in triangulating position.
A new acoustic navigation system was developed to determine the position and speed of moving underwater objects such as divers and underwater vehicles. The path of an object and its speed were determined by the Doppler shifts of acoustic signals emitted by a transmitter placed on the object and received by four hydrophones installed at the periphery of the monitored body of water. The position and speed measurements were affected by errors mainly caused by acoustic reflections (returns) from the water body boundaries and surface reverberations. (Ostrowski, 2020).
The Office of Naval Research (ONR) contracted with Penn State Applied Research Lab to research and build enabling technologies for sonar-based continuous subsea autonomous navigation for manned and unmanned submarines. The joint effort is called the Advanced Broadband Navigation Sonar System Future Naval Capabilities program, and its main goals are to “improve undersea position and velocity estimation using sonar to give Navy manned submarines and unmanned underwater vehicles (UUVs) enhanced navigational performance.” (Keller, 2019)
Navigation capabilities can also be improved with exteroceptive sensors (optical or sonar) that identify specific landmarks in the environment and use them to localize the UUV. If a map is available, this approach is known as map-based localization. When no map is available, AUVs can perform simultaneous localization and mapping (SLAM), in which the vehicle concurrently builds a map of relevant features and uses it to navigate. (Petillot, 2019).
The challenge facing UUVs is they will need to operate and navigate autonomously; the data collected must be accurate, reliable, and reusable. Using techniques such as SLAM “to help in autonomous navigation, namely in unstructured environments and when the initial information is poor’ in this technique, the robot constructs a coherent map of its environment while, at the same time, determines its location within that same map.” (Ana Rita Silva, 2019).
This SLAM method can be used to inform and integrate into “Terrain‐aided navigation (TAN), a form of geophysical localization where physical features of the seabed are exploited to localize an AUV within an a priori digital elevation model (DEM), or bathymetric reference map.” (Salavasidis, 2019).
As the navigation of UUVs moves from past technologies and techniques into the future, “The accuracy and reliability of navigation information are one of the guarantees for AUV’s successful execution…and the SINS/ Doppler velocity log (DVL) integrated navigation method can provide continuous and accurate navigation information for autonomous underwater vehicles” (Wang, 2020). However, this navigation method may contain large error or can be inaccurate when certain “beam measurements are inaccurate or outages for complex underwater environment… a novel tightly integrated navigation method composed of a SINS, a DVL, and a pressure sensor (PS) is proposed, in which beam measurements are used without transforming them to 3-D velocity” (Wang, 2020).
The ability to navigate underwater was created for manned systems. In the new frontier of UUVs, precision navigation by both manned and unmanned systems must be able to operate autonomously, alongside of and ultimately integrate with each other resulting in a safe and exciting future.
Advancements in the UUV Arena
Previously UUVs had limited technology available to them, this lack of advanced technology forced simplicity. With the focus now on multiple autonomous systems working in concert with each other and the integrated use of UUV with manned systems and “the sophistication and complexity of these new technologies have attendant risks. Future strategic submarine navigation development requires attentive observance to ensure that the real benefits of affordability are realized by the insertion of new technologies” (Vajda, 1998)
In examining technology maturity models for the UUV arena, the examination quickly reveals that the technology is truly in its infancy state. As the model in Figure 4.4 indicates, simple automation is step one, and this is now being demonstrated with UUVs; however, UUVs are a long way off from being trusted independent, self-governing, with minimal human intervention.
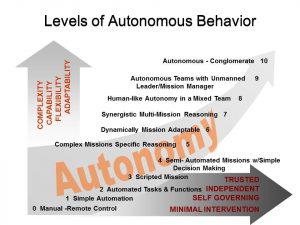
Figure 4.4: Levels of Autonomous Behavior
Source: (Mumm, 2019)
UUV advancements include such technology areas as propulsion, precise navigation, acoustic communication, low-speed vehicle control, stealth, robotics, and mission control… both traditional and non-traditional navigation technologies, with traditional navigation encompassing improved inertial navigation, Doppler velocity sonar, and data fusion, and non-traditional techniques including terrain following, geophysical, and magnetic lines of position; acoustic underwater communications technologies that feature a high data rate and low bit error rate using channel equalization techniques; low-speed hydrodynamic control that employs an adaptive, nonlinear controller; and finally, command and control systems that utilize an intelligent controller with such capabilities as planning, re-planning, and fault tolerance. (Cancilliere, 1994).
One of the keys to the success of UUVs will be to mature the navigation capabilities as “a profusion of emerging navigation technologies enables us to further advance the strategic submarine navigation system in a more affordable manner” (Vajda, 1998). Several of these new navigation technologies are “based on a simple concept of overlaying maps…what we are defining as the “Geospatial Revolution “” (Kumar, 2014) as Geographic Information System (GIS) “technology, which has long provided effective solutions to the integration, visualization, and analysis of information about land, is now being similarly applied to oceans.” (Wright, 2013)
In 2012, Esri launched an Ocean GIS initiative in support of GIS in both coastal and open ocean applications. The ability to map the oceans and the environmental and human physical changes that are occurring will be vital for autonomous UUVs to operate successfully and navigate in the most efficient manner possible. Figure 4.5 offers a glimpse of the layers of information that the Ocean GIS initiative will be able to provide for mapping and navigational aids.
Figure 4.5: The Ocean GIS Initiative
Source:(Kumar, 2014)
The Ocean GIS Initiative: Taking GIS Underwater (Kumar, 2014)
Esri’s Ocean GIS initiative is developing mapping and spatial analysis tools, geospatial data with the ocean’s community in five main areas:
- Research and Exploration- Seafloor mapping and sampling, geomorphological studies, and tectonophysics
- Benthic habitat mapping for estimating species abundance, identifying essential fish habitat, and ultimately conserving sensitive or endangered areas
- Shoreline analysis, including calculation of rate-of-change statistics from multiple shoreline positions to analyze historical shoreline change
- Climate change, including measuring or simulating the potential impacts of sea-level rise on shorelines and wetlands, impacts of storms due to increasing ocean temperatures, impacts to ecosystems due to increasing ocean acidification, and global energy transfer
- Hazards, including the analysis of risk and potential loss of buildings and infrastructure due to hurricane winds, coastal floods, tsunamis, and nearshore or onshore earthquakes. (Wright, 2013)
Marine debris mapping and tracking is another area that GIS is attempting to assist with small plastics and other debris as they are not detectable with satellite imagery. In that past, it was not possible to integrate all of this data “Over 90% of cargo is shipped via Ships, and at least a hundred million people world over depend on the oceans for their living. Oil spills and other disasters in the past could not be modelled using GIS, but now we have the means to model them.” (Kumar, 2014)
The different classes of UUVs is moving the industry from small hobby and research size vehicles of just a few meters in length into what is now known as an extra-large unmanned undersea vehicles (XLUUVs) “which are among the largest unmanned submersibles ever conceived, will be for long-endurance surveillance missions or undersea cargo vessels to deliver other sensor payloads and other UUVs.” (Keller, 2019). Figure 4.6 offers a glimpse as to how fast the defense industry is moving towards XLUUVs. These large unmanned undersea vehicles could be used as motherships to deploy and recover smaller surveillance UUVs or be used to pair and team with manned submarines in the open ocean or along coastlines and inside harbors.
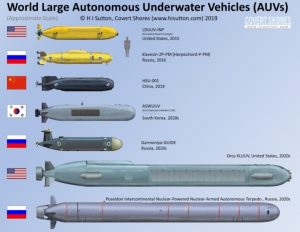
Figure 4.6: World Large Autonomous Underwater Vehicles
Source: (H, 2019)
The Orca project is being built by Lockheed Martin and Boeing, and it “is developing a delivery system for payloads that could involve persistent-surveillance sensors, weapons, or other UUVs and UAVs.” (Keller, 2019). The Orca is being designed with modular construction principles and “will be an open-architecture reconfigurable UUV with the core vehicle providing guidance and control, navigation, autonomy, situational awareness, core communications, power distribution, energy and power, propulsion and maneuvering, and mission sensors.” (Keller, 2019)
The advances in the UUV arena are notable from the control theories that will offer a gradual movement towards full autonomy, to the navigation, a real key to the ability for the UUV industry to become more mainstream in the defense, logistics, and commercial arenas. The increasing investments in UUV technologies clearly signal the overall market acceptance of this unmanned system. The rapid escalation of both size and complexity of UUVs offers a glimpse of the integration of UUVs into the overall autonomous systems architecture and the emerging trust factor to team manned and unmanned systems together for the mutual success of all involved.
New Challenges Require New Thinking for Underwater Bases, Ports and Inland Waterways
Underwater bases for UUVs simply makes sense, as surface ships already operate in a known and agreed upon fashion in ports and waterways throughout the world. Attempting to add in UUVs to these already busy locations can add complexity that may create safety and economic issues that are not tenable in many locations.
In the underwater domain … achieving interoperability is currently impossible due to the lack of common standards and protocols for wireless communication.
Almost all underwater vehicles or sensors currently use proprietary interfaces and protocols for communication, especially for wireless communication in water.
This implies that UUVs made by different manufacturers cannot communicate with each other, even if they operate in the same area and human operators afloat or ashore cannot control these UUVs unless they use the control systems supplied by each manufacturer. (Wilson, 2019).
Up to this point, UUVs have been relatively benign sensor platforms; however, weaponization cannot be far behind. UUVs can quickly become formidable tactical and strategic weapons. Current UUV technology allows them to become a precision weapon that can be used in many varied ways. They can be used at different levels of warfare and eventually by either or both sides in a conflict.
The U.S. Navy’s top officer has ordered his staff to develop a comprehensive strategy to field unmanned systems in the air, on the water and under the sea over the coming years. Dubbed “unmanned campaign plan,” it looks to tie together all the disparate programs into a coherent way forward, Chief of Naval Operations Adm. Michael Gilday told Defense News in a July 16 [2020] interview. “We’ve got … a family of unmanned systems we’re working on,” Gilday said. “Undersea we’ve got extra-large, large and medium [unmanned underwater vehicles]; on the surface, we have small, medium and large [unmanned surface vessels]; and in the air, we have a number of programs. (Larter, 2020)
At the lowest offensive conflict level, UUVs can be used to blockade a port, close off a straight, shadow ships or submarines or lie in wait around underwater bases. All these activities can be done with or without conventional warheads. Defensively, UUVs can provide a barrier to submarines, ships, and other UUVs. With a slight increase of the conflict level, UUVs can detonate enemy mines, eliminate enemy UUVs, and interfere with sonar systems on enemy ships or submarines. Should a UUV passively interfere with another vessel’s navigation system, this leaves the UUV blind to possible submarine attacks. To save a lot of power and significantly increase the potential danger to enemy ships and submarines, the UUVs can also act like Remora fish and attach themselves to the enemy vessel. Subsequently, the UUVs can detach at their leisure to avoid capture and remain viable for the next vessel. In a more combative action, the UUV could have a targeted minor collision with a submarine’s propeller; this in turn could cause significant increase in that submarine’s signature to passive sonar detectors.
Rogue nations and non-state actors could likely occupy the next level of conflict by using UUVs to attack commercial shipping, oil platforms, undersea communication cables, offshore wind turbine power cables, undersea oil and gas pipelines or other defenseless targets. In this new type of asymmetric warfare, there are exponentially higher impact targets not traditionally defended. Government organizations and commercial entities will need to reassess how ocean assets are protected from this new threat. Organizations need to consider it is not only the UUVs abilities but the UUVs host’s capabilities that need to be considered for threat analysis.
In addition to the asymmetrical conflicts, there are also indirect levels of conflict. Cyber, drones, and some types of bioweapons are the current leaders in this arena. UUVs could soon be added to the list. Weaponized UUVs can render regional and international port facilities extremely vulnerable to disruption or even destruction. Additionally, vehicle and rail bridges, critical infrastructure on or adjacent to inland waterways could also severely disrupt the transportation system should a weaponized UUV find its’ target.
Dams are difficult to attack from downstream. However, they are potentially vulnerable to lakeside attack. In this case, the release vehicle would be a boat or truck upstream of the dam leaving a large vulnerable area. Drones could also be considered as a potential release vehicle, however due to size, the drone would most likely be detected before the release point.
Inland waterways are often essential sources of water for towns and cities as well as to the commercial fishing industry and irrigation. These items can render the population vulnerable to a biological attack using a UUV as the release vehicle. These biological attacks may not be chemical but have the potential to use natural invasive species.
Direct Warfare Port Scenario
Direct warfare involves offensive and defensive operations directly related to the enemy’s military and war-making capabilities. UUVs would be relevant sensor platforms, offensive and defensive weapons systems. Defensive operations would include not only manned vessels but enemy UUVs. All combatants on the water or under the water would become potential targets and would require defensive capabilities to survive. A primary survival technique is likely to be speed. UUVs generally lack the speed of military vessels. Short UUV sprints by specifically designed attack UUVs could still create some danger for those vessels or cause them to be fast and noisy for easier detection by manned attack vessels.
Imagine this scenario: as tensions between Taiwan and China spike, U.S. intelligence reports that PLA Navy warships will soon sortie from various Chinese ports. In response, U.S. submarines discreetly place a set of large unmanned undersea vehicles — one per port — on the seabed floor of the Taiwan Strait. Once settled, each UUV waits for the order to release a half-dozen smaller craft, each armed with explosives and non-kinetic effectors.
The order comes and the small craft deploy, maintaining connections to a command module via acoustic and satellite links. These tactical craft loiter just outside the ports, until one by one, they detect the unique acoustic signature of their assigned Chinese warship and break off to intercept it. Once in position, three feet under a Chinese keel, each tactical UUV signals its status back to a command center and awaits the order to immobilize its target. (Frandrup, 2019)
Leveraging Underwater Bases
As the rest of the world watches the scenario unfold, nations would establish underwater UUV bases to thwart these types of attacks. These same bases could also be leveraged to address the threat of quiet, cheap, manned attack submarines from rogue nations or illegal commercial activities. Quiet diesel-electric and fuel cell manned submarines could likely become a threat to coastal areas or that of our allies. Underwater UUV bases would allow continuous and routine UUV operations in the area. “The U.S. Navy is developing an underwater charging station for its unmanned undersea vehicles. The technology, which does away with cables, will make it easier for drones to recharge at sea.” (Mizokami, The Navy Is Working on Underwater Wireless Charging Stations for Robot Subs, 2017) The UUVs could also use these remote recharging stations to receive new mission instructions. UUVs with maintenance issues would be gathered up on a routine schedule by surface vessels, repaired, and released back to the base.
Figure 4.7: UUV Charging Station
Source: (Mizokami, Why Russia’s Unique Supercavitating Torpedoes Are so Fast, 2019)
Underwater UUV bases similar to Figure 4.7 would become a significant force multiplier for the Navy. Powering and communicating with these underwater bases have several technical challenges. Power is potentially the easier issue to solve as there are geothermal, current turbines and even nuclear options available. Communications is often more challenging to achieve. For bases near to shore, a buried cable could be established. For those bases that are more remote, perhaps a dedicated UUV that surfaces randomly away from the base to communicate with a scheduled satellite link. Once the information is received from the satellite, the UUV could return to the remote base and download the information. Underwater optical links can be added if a distribution source is nearby, such as a modified undersea communications cable or a support ship.
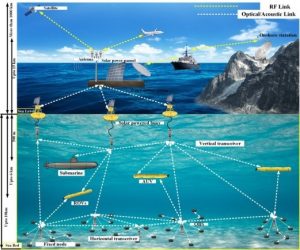
Figure 4.8: Optical Links for UUVs
Source: (Mohammad Ali, 2019)
Mission Planning with Swarming UUVs
The concept of swarming has been around for decades. Nature has led the way in providing successful examples of swarms with bees and ants. Part of the swarming theory is that no single entity has enough information to carry out a complex mission; however through mutual cooperation the swarm can successfully complete complex maneuvers in a multitude of environments. The swarming capability of unmanned systems has been demonstrated at rudimentary levels. Swarming capabilities are maturing as several UUVs are able to team with each other, as well as with manned submarines, surface vessels, and aircraft. See Figure 4.8 for how UUVs could be linked together as a swarm. The capability for UUVs to act on their own mission objectives, and as a collaborative set with other UUVs to obtain a goal offers an almost limitless range of abilities for this technology. An example of this is the SwarmDiver, manufactured by Aquabotix Technology Corporation.
The Swarm Driver test vehicle can dive as deep as 600 feet while working in synch with other UUVs submersibles. “The swarming algorithm allows vehicles to communicate with each other to make decisions as a group. This allows SwarmDiver to quickly and accurately self-arrange in various swarm formations, as well as dive simultaneously to collect synoptic data sets,” according to Aquabotix (Wilson, 2019).
Curiously, the ability for multiple unmanned systems to be assigned specific mission parameters as a single unit, and then sense the need to swarm with other systems to successfully complete a task is quite difficult to program. The technology to act as a single unit, swarm, and then again as a single unit has not been demonstrated to the level of confidence to believe that the technology is ready for real world implementation.
Current UUV operations almost exclusively involve a single vehicle performing a single task. In the future, UUVs will be able to operate in groups or even swarms. Size, speed, and range of UUVs coupled with the vastness of territory to be covered drive many offensive and defensive UUV scenarios to leverage the swarm theories. The possible exception to swarming is a category of very large UUVs or small manned hybrid powered submarines.
Perimeter Protection Planning Considerations
Swarms can be made up of homogeneous or heterogeneous UUVs. Unlike typical manned crafts where sensors, weapons, and decision-making authority are collocated, UUVs can split these functions up as required. Both homogeneous and heterogeneous UUV types are useful; however, these functions use power, take up space, and can be difficult to implement; this tends to drive the heterogeneous UUVs towards swarms. Where some UUVs are the sensor platforms, some are the weapons platforms, and the decision making is distributed and collaborative.
The primary sensors for these UUVs will most likely be a variety of active and passive sonar coupled with cameras for close up operations. There are several sonar techniques for single vehicles, but when multiple vehicles are leveraged in the swarm environment, the bi-static method becomes very useful. One UUV pings and the others listen. The UUV that pings rotates in a preplanned manner to best cover the area and provide additional data for processing. Several sonar strategies will need to be developed for swarm detection and engagement operations. Will the engagement be active, passive, or bi-static? How many UUVs will commit to the engagement? Will more than one UUV be actively pinging? Will there be unique ping frequencies, or will a type of unique pulse repetition be used like with radar?
The term “asymmetric threat” is now familiar in the lexicon, and terrorist actions are a frequent occurrence. For naval forces, the classical terms “blue water” threat and “major threat axis” no longer hold the significance they once did. The threat environment has moved from the “blue water” to “brown water,” or littoral regions, placing emphasis on power projection, force protection, and expeditionary operations in littoral areas. (Board, 2005)
Prior to the engagement, there must be several things to consider including identifying what types of weapons the UUVs might use? These weapons options can be divided into destructive and non-destructive. The destructive can be further decomposed into those that have warheads, those that have an integrated directional warheads but survive the attack to be reused, those that attach the warhead and leave before detonation, and those that expend ordinance from a distance that can be reused.
The first type of weapon may be a smart torpedo during the attack phase. The swarm is either deployed from a ship, sub, or underwater base and work as a team to acquire the target then determines the tactics to destroy the target using one or more of the deployed UUVs. The next type of weapon would typically have a shaped charge as its destructive mechanism. This is most useful for eliminating mines, and it can also attack targets that are slow compared to the UUV. The weapon with an attack shaped charge warheads to targets are most useful in going after ships,

Figure 4.9: Supercavitating Bullet
Source: (Blain, 2019)
submarines, pipelines, or other stationary targets in a port scenario. They can also place open ocean fiber optic cables, pipelines, and oil rigs at risk. Each type can put these valuable items at risk. The last type allows for expanded tactics set and can engage targets faster than they are with enhanced success by operating as a swarm. The most common solution for this type of UUV is one that is large enough to deploy standard torpedoes. There are short and long standard torpedoes. It would be more likely for the UUV to use a shorter variety, but they could efficiently be designed for longer torpedoes. A less common, but more compact solution for this set of UUVs are the super cavitating weapons. These cavitating weapons come in two types: bullets or rockets. Bullets have a shorter range and a smaller target set, but would be very effective against other UUVs, USVs (Unmanned Surface Vehicles), and other small boats. See Figure 4.9 as an example of a cavitating bullet underwater. “Norway’s DSG has used the drag-reducing abilities of super-cavitation to produce some truly extraordinary projectiles that’ll hit submerged targets up to 60 m (200 ft) away, opening up some interesting new mission capabilities” (Blain, 2019). The super cavitating rockets would have a longer range and potentially an extensive target set. The Russian VA-111 Shkval torpedo is a large version of this type of weapon. Water creates a lot of drag and typically limits torpedoes to about 50 knots.
Shkval solves this problem by diverting hot rocket exhaust out of its nose, which turns the water in front of it into steam. As the torpedo moves forward, it continues vaporizing the water in front of it, creating a thin bubble of gas. Traveling through gas, the torpedo encounters much less drag, allowing it to move at speeds of up 200 knots. (Mizokami, Why Russia’s Unique Supercavitating Torpedoes Are so Fast, 2019)
One type of warhead was intentionally left out of the previous discussion, and that is a nuclear warhead. This type of warhead is unlikely to be used by the U.S. and its allies. However, it could easily become a weapon of choice for terrorists or rogue nations. It is not by chance, that many of the world’s economic centers are located on coastal waters or major inland lakes and rivers. The threat acknowledgement by these cities would increase the need for new and different active defenses and additional channels for intelligence collections.
Strategies and tactics for UUVs are only limited by the type of UUV, the sensors, the weapons (if any), the target set, and the mission planner’s creativity. It is expected that UUVs will expand significantly in both numbers and capabilities in the near future.
UUV Policies and Governance for Consideration
The ability to create UUV navigation lanes and standard operating procedures will require laws, policies, governance and leadership from many organizations, host nations and port owners around the world. The U.S. National Geospatial-Intelligence Agency (NGA) is already tasked with providing geospatial intelligence (GEOINT) for navigable seaways as part of the Maritime Safety Office. The mission of the office is to “Provide global maritime geospatial intelligence in support of national security objectives, including safety of navigation, international obligations, and joint military operations” (Maritime Safety Information, 2020). Currently, there are no discernable leaders at the intersection of GEOINT and autonomous technology, security, and protocols — whether public, private, commercial, or international. There appears to be minimal government coordinated efforts that are actively examining the entire unmanned architecture and its massive GEOINT data needs.
The amount of information that NGA will be required to supply in the future is not well documented. NGA must capture future needs and GEOINT collection requirements for navigational safety in the new world of autonomous infrastructures. Spatial-temporal anomalies will become the norm, and NGA must document and engage in the construction of autonomous communal infrastructures and what data is required to allow these infrastructures to act and react accordingly for the safe operation of all autonomous systems.
The current autonomous system framework is fragmented without coherent oversight, direction, documented requirements, and lacks defined authorities, “Unmanned undersea operations continue to be limited by the complex, dynamic conditions of the ocean environment and the unique operational constraints they engender. Three critical capabilities – communication, energy, and autonomy – will drive future developments in this domain” (Analysis: Cyber in the Undersea, 2020). Advanced coordination and collaboration endeavors must be focused to include determining the responsibilities and authorities of an unmanned architecture, its specific uses, exceptions, and allowances for robotics operations; including studying the unintended consequences, future use, and misuse of such technologies.
Clear policies, laws, and governance are required as a danger to the nation, and a global response to UUVs is becoming undeniable. There is currently no single agency on a national or international level in charge of this issue. Currently, there are no policies, governance or doctrines in place for tracking or identification capable of offering reliable defenses against teamed autonomous systems. There is no single sensor type, defense posture, or reliable countermeasure to stop this evolving threat, although “The Navy also is moving forward with its new Unmanned Maritime Autonomy Architecture (UMAA) program to evaluate levels of autonomy in unmanned submarines, enable commonality of autonomy technologies, and reduce acquisition costs” (Wilson, 2019). This program will take years to solidify and become a part of the modern navy. The consequences can be catastrophic as asymmetric warfare becomes more asymmetric should governments fail to take a more pronounced leadership role in the autonomous arena.
Conclusions
UUV are an up and coming technology with many military and civilian uses already being explored. The technology breakthroughs that will allow UUVs to move towards their full potential will lag behind other autonomous systems; however UUVs will be included, integrated and connected to manned and unmanned systems within the next few years. Without ongoing, real-time communication with controllers, other vehicles and the framework to operate under “operators unmanned undersea systems will rely heavily on autonomy and artificial intelligence, and as operations increase in sophistication, intensity and complexity, the greater will be the need for trustworthy systems that can “OODA” (Observe, Orient, Decide, Act) in a dynamic and challenging environment” (Analysis: Cyber in the Undersea, 2020). The reliance on real time communication, the need for AI in UUVs and the immature nature of the laws, policies and governance for this unmanned technology (and all autonomous systems) that will be so fully integrated into the waterways, economy and warfare in our world will slow the adoption of UUVs into everyday marine life. This slowness of adoption does not appear to be affecting the innovation, research and development and employment of the technology at the rudimentary level.
Questions
- What is the difference between the navigation requirements for a manned submarine and a UUV?
- What mission are UUVs best suited for in lieu of a manned counterpart?
- Does the UUV size and composition matter? Why or why not?
- Describe examples of how a UUV could be used to protect a port area?
- Are optionally piloted submarines safer than deploying UUVs on their own?
References
Ana Rita Silva, G. &. (2019). Simultaneous Underwater Navigation and Mapping. U.Porto Journal of Engineering, pp. 5(2), 1-9. doi:10.24840/2183-6493_005.002_0001.
Analysis: Cyber in the Undersea. (2020). Retrieved from www.strikepod.com: https://www.strikepod.com/cuber-implications-for-microsubmarines/
Blain, L. (2019). DSG’s supercavitating underwater bullets annihilate ballistics tests. Retrieved from newatlas.com/: https://newatlas.com/military/dsg-cavx-supercavitating-underwater-bullets/
Board, N. S. (2005). AUTONOMOUS VEHICLES IN SUPPORT OF NAVAL OPERATIONS. National Academies Press.
Cancilliere, F. M. (1994, September 13). Advanced UUV technology. Paper presented at the Proceedings of OCEANS’94. (pp. (1994, 13-16 Sept. 1994)). OCEANS’94.
Discovery of Sound in the Sea. (2020, August 1). Retrieved from dosits.org/science/: https://dosits.org/science/sounds-in-the-sea/how-do-people-and-animals-use-sound-in-the-sea/sonar/#:~:text=In%20active%20sonar%2C%20the%20system,one%20is%20trying%20to%20locate.&text=When%20a%20sound%2
Frandrup, C. E. (2019). The US Navy Needs Offensive Undersea Drones. Retrieved from www.defenseone.com: https://www.defenseone.com/ideas/2019/11/us-navy-needs-offensive-undersea-drones/161548/
H, S. (2019). Large_AUVs_Poster. Retrieved from www.hisutton.com: http://www.hisutton.com/Large_AUVs_Poster.html
Inertial guidance system. (2020). In Encyclopaedia Britannica: Encyclopaedia Britannica.
Joanne, M. (2019). Engineering Wonders Submarines and Submersibles. Vero Beach: Rourke Educational Media.
Keller, J. (2019). Lockheed Martin to capitalize on XLUUV work for future unmanned undersea vehicles. Military & Aerospace Electronics, pp. 30(9), 35-37. .
Kumar, M. (2014). The Ocean GIS Initiative: Taking GIS underwater. Retrieved from geoawesomeness.com/gis-underwater/: https://geoawesomeness.com/gis-underwater/
Larter, D. B. (2020, July 7). US Navy to develop drone deployment strategy. Retrieved from www.defensenews.com/naval: https://www.defensenews.com/naval/2020/07/21/the-us-navy-is-trying-to-get-its-act-together-on-unmanned-systems/
Laser Ring Gyroscope for Inertial Navigation System . (2020). Retrieved from mh-elec.en.alibaba.com/: https://mh-elec.en.alibaba.com/product/62231832543-802666356/Buy_active_motorized_precision_laser_ring_gyroscope_for_inertial_navigation_system.html
Maritime Safety Information. (2020). Retrieved from msi.nga.mil/: https://msi.nga.mil/
Mizokami, K. (2017, August 29). The Navy Is Working on Underwater Wireless Charging Stations for Robot Subs. Retrieved from www.popularmechanics.com: https://www.popularmechanics.com/military/research/news/a27986/the-navy-is-developing-undersea-wireless-charging-stations-for-robot
Mizokami, K. (2019). Why Russia’s Unique Supercavitating Torpedoes Are so Fast. Retrieved from nationalinterest.org/: https://nationalinterest.org/blog/buzz/why-russias-unique-supercavitating-torpedoes-are-so-fast-101627
Mohammad Ali, D. J. (2019). Archives of Computational Methods of Engineering, pp. doi:10.1007/s11831-019-09354-8.
Mumm, D. H. (2019). Artificial Intelligence and the Human Race…Can They Co-Exist in Your Marketplace? Boston, MA.: Evanta.
Navigating a Submarine: Time and Navigation-The Untold Story of Getting from Here to There. (2020). Retrieved from timeandnavigation.si.edu/: https://timeandnavigation.si.edu/satellite-navigation/reliable-global-navigation/first-satellite-navigation-system/navigating-a-submarine
Nobahari, H. &. (2017). Accuracy Analysis of an Integrated Inertial Navigation System in Slow Maneuvers. Retrieved from onlinelibrary.wiley.com/doi/abs/10.1002/navi.195: https://onlinelibrary.wiley.com/doi/abs/10.1002/navi.195
Ostrowski, Z. S. (2020). Underwater Navigation System Based on Doppler Shift – Measurements and Error Estimations. Polish Maritime Research, pp. 27(1), 180-187. doi:10.2478/pomr-2020-0019.
Petillot, Y. R. (2019). Underwater Robots: From Remotely Operated Vehicles to Intervention-Autonomous Underwater Vehicles. IEEE Robotics & Automation Magazine, pp. 26(2), 94. .
Salavasidis, G. M. (2019). Terrain‐aided navigation for long‐endurance and deep‐rated autonomous underwater vehicles. Journal of Field Robotics, pp. 36(2), 447-474. doi:10.
Vajda, S. &. (1998). Survey of existing and emerging technologies for strategic submarine navigation. IEEE 1998 Position Location & Navigation Symposium , pp. (Cat No98CH36153), 309. .
Wang, D. X. (2020). A Novel SINS/DVL Tightly Integrated Navigation Method for Complex Environment. IEEE Transactions on Instrumentation and Measurement, pp. 69(7), 5183-5196. doi:10.1109/TIM.2019.2955187.
Whitman, E. C. (2002). Unmanned Underwater Vehicles: Beneath the Wave of the Future. Retrieved from www.public.navy.mil/subfor/: https://www.public.navy.mil/subfor/underseawarfaremagazine/Issues/Archives/issue_15/wave.html
Wilson, J. R. (2019). Unmanned submarines seen as key to dominating the world’s oceans: Unmanned underwater vehicles (UUVs) are driving pioneering research in artificial intelligence (AI) underwater communications, autonomous navigation, and unmanned swarms. Military & Aerospace Electronics, pp. 30(8), 10-19. .
Wright, D. (2013). The Ocean GIS Initiative. Redlands CA: ESRI Incorporated.
